
The implementation problem (again)
实施问题(再次)

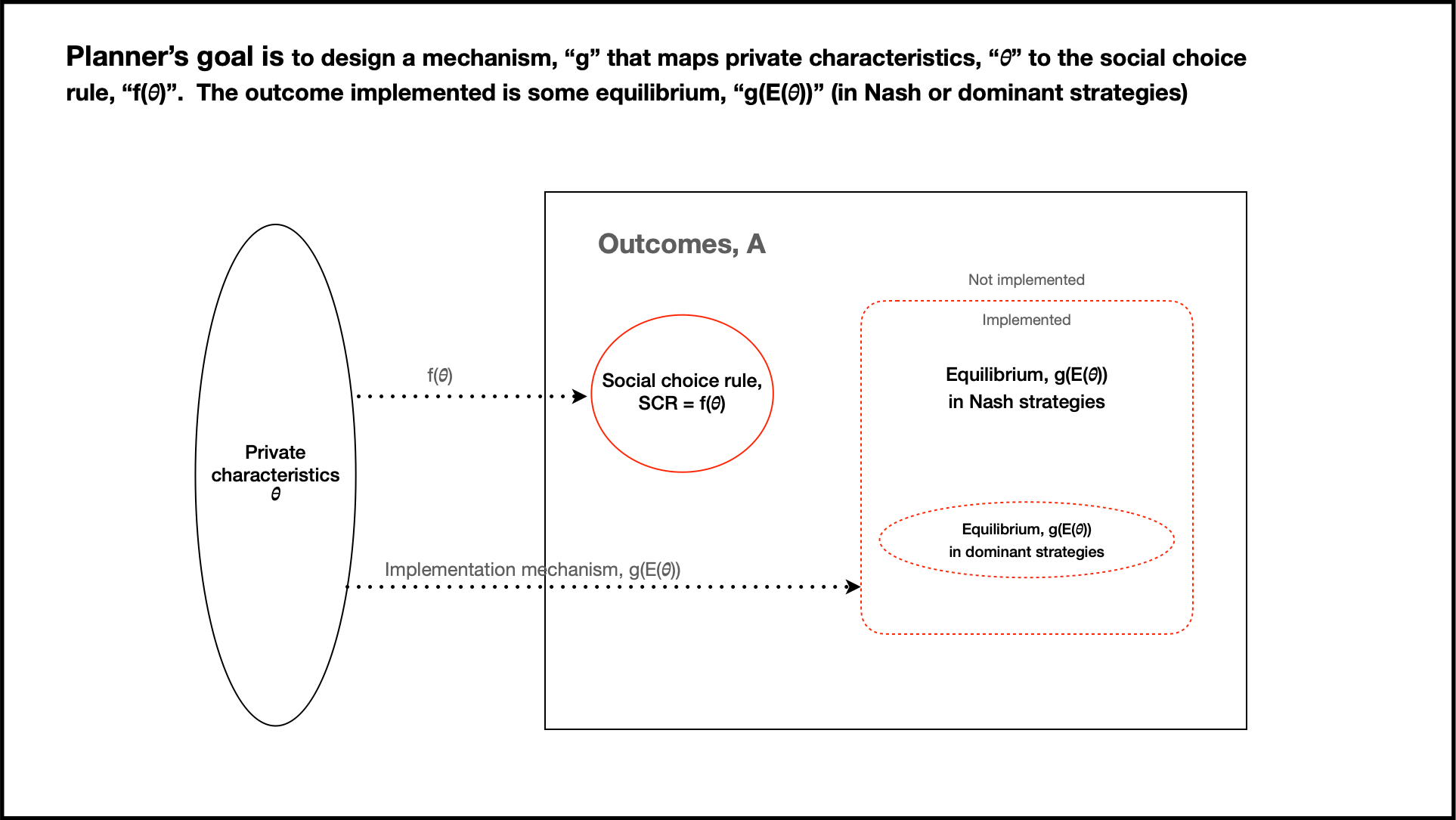
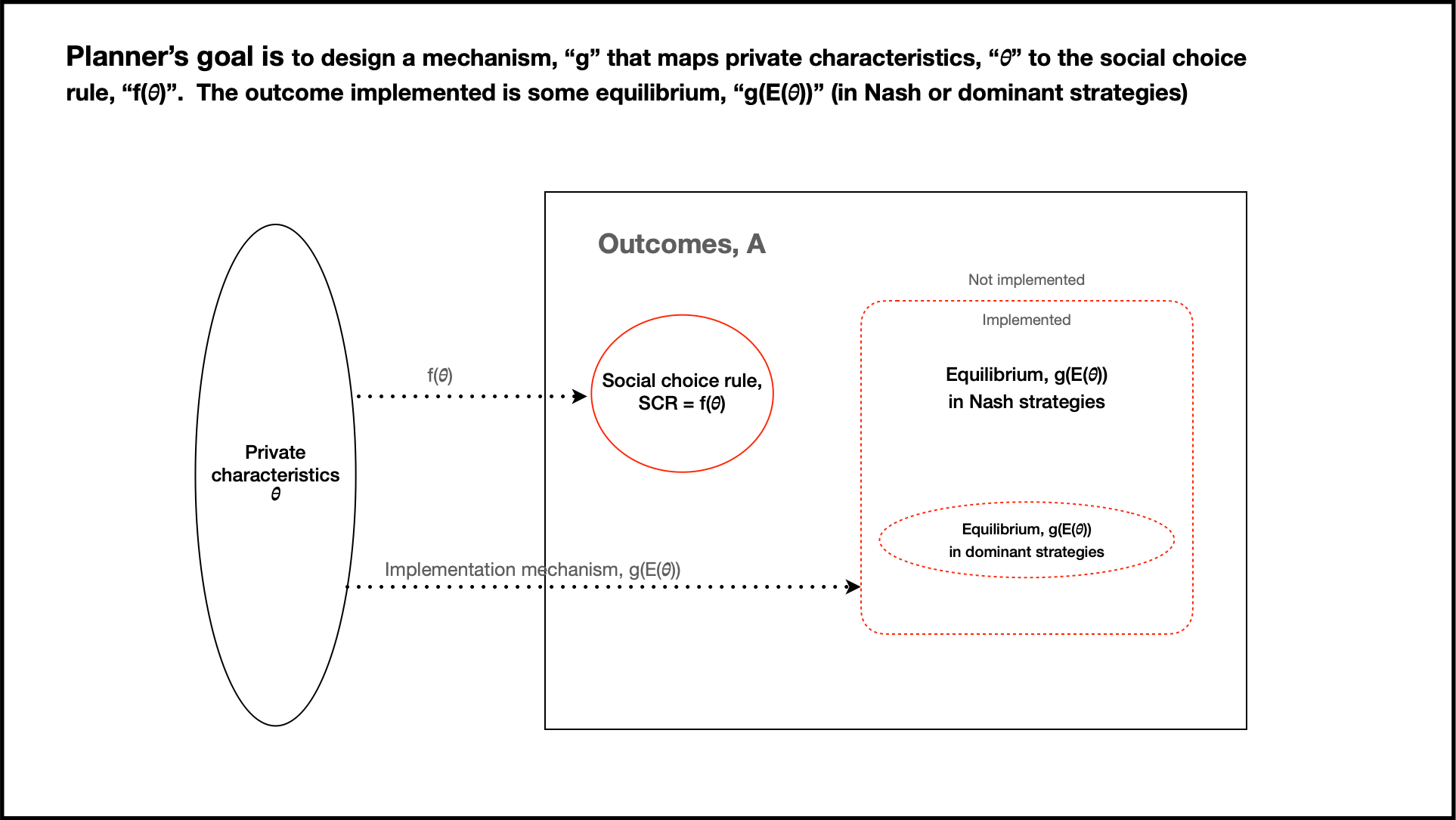
The planner’s goal is to design a mechanism, “g” that maps the players’ private characteristics, “𝜽” to the social choice rule, “f(𝜽)”. The outcome is some equilibrium, “g(E(𝜽))” (if it exists at all).
The subsets, “f(𝜽)” and “g(E(𝜽))” need not overlap. Mechanism “g” is said to implement the social choice rule if (and only if) g(Eg(𝜽)) ⊆ f(𝜽). If g(Eg(𝜽)) = f(𝜽), then the mechanism also “fully implements” the social choice rule.
In population biology, the behaviour (i.e., phenotype) of living species collectively form an equilibrium as each species (and each individual) adapts to the ecology. Here, the ecology is itself a mechanism that operates directly on the phenotype of each species and individual.
The same is true for human societies, except that social institutions (in addition to the physical environment) collectively operates (as a “mechanism”) on individual (and coalition) behaviour. Unlike population biology, human societies also have social goals (and commitments); we may want to alter existing social institutions so that equilibrium behaviour falls within some democratically chosen rule: g(Eg(𝜽)) ⊆ f(𝜽).
However, the equilibrium outcome also depends on the individuals’ private characteristics. Further:
a social planner can only observe an individual’s behaviour (“si”), not her private characteristic (𝜽i); and
each individual only knows her own private characteristic (𝜽i), not another’s private characteristic (𝜽j).
At best, the planner (and each individual) guesses at the private characteristics; for example, that they fall within some probability distribution.
计划者的目标是设计一个机制“g”,将玩家的私人特征“𝜽”映射到社会选择规则“f(𝜽)”。结果是一种均衡“g(E(𝜽))”(如果存在的话)。
子集“f(𝜽)”和“g(E(𝜽))”不需要重叠。当(且仅当)“g(Eg(𝜽)) ⊆ f(𝜽)”,机制“g”才被认为实施社会选择规则。如果“g(Eg(𝜽)) = f(𝜽)”,则该机制也“完全实施”了社会选择规则。
在种群生物学中,随着每种物种(和每个个体)适应生态环境,生物物种的行为(即表型)集体形成一种均衡。在这里,生态环境本身是一种直接作用于每个物种和个体表型的机制。
人类社会也如此,只是社会制度(除了物理环境)集体(作为一种“机制”)作用于个体(和联盟)行为。与种群生物学不同,人类社会也有社会目标(和承诺);我们可能希望改变现有的社会制度,使均衡行为符合某些民主选择的规则:g(Eg(𝜽)) ⊆ f(𝜽)。
然而,均衡结果还取决于个人的私人特征。此外,
社会计划者只能观察个人的行为(“si”),而不能观察她的私人特征)(“𝜽i”);
每个个体只知道自己的私人特征(“𝜽i”),而不知道别人的私人特征(“𝜽j”)。
计划者(和每个个体)最多只能猜测他人的私人特征;例如,它们属于某种概率分布。